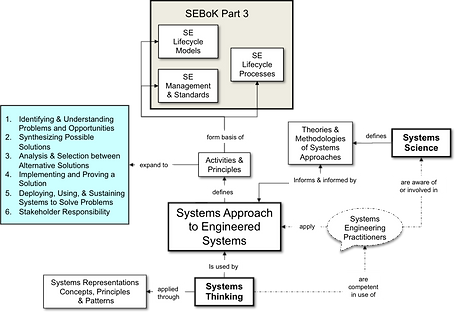
Systems Approach
Below, I will explain how a systems approach was applied throughout this project, detailing the integration of various components, iterative testing, and adjustments that led to the successful navigation of the robot.
01
Identify Problems
-
To build an arena that simulates the Merlion Park environment to test the navigation capabilities of the LIMO robot.
-
Dimensions
-
-
What capabilities of the LIMO robot are we testing
-
localization, mapping, path planning, navigation, and obstacle avoidance.
-
02
Identify Key stakeholders
Key Stakeholders:
Technical Managers or Systems Engineers / Project Managers or Team Leads / Non-Technical Professionals / Industry Professionals or External Stakeholders
Stakeholder Needs:
-
Showcase the LIMO robot path planning, navigation, and obstacle avoidance capabilities
-
Practical and relevant solutions in real-world applications.
-
Follow industry standards and safety practices
Stakeholder Requirements:
-
Arena must test all the function of the LIMO robot
-
Clear project plans, risk management strategies, and effective resource and timeline management.
-
Documentation and presentations that are accessible and clear, without technical jargon.
-
Solutions that demonstrate real-world applicability, relevance, and potential for implementation.
03
Synthesizing Possible Solutions
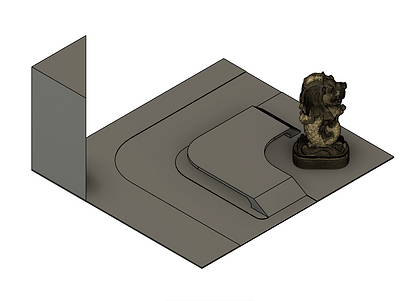
This is the initial synthesized navigation path of the autonomous robot in the custom-designed arena. The image beside shows the first iteration of the robot's possible solution before fine-tuning path dimensions. This initial path highlights the starting challenges and inefficiencies, providing a baseline for subsequent improvements. Below, I will explain how a systems approach was applied throughout this project, detailing the integration of various components, iterative testing, and parameter adjustments that led to the successful navigation of the robot.
04
Second Iteration
Decided to create two paths, one longer path and a shorter path that includes a slope with increased incline from the first iteration. The One Fullerton Mall was placed in the centre to make it more visible and the merlion was placed at the corner.

05
Third Iteration
We realised that we should have placed more emphasis on the merlion as to make the merlion park more recognisable. Merlion was shifted to the centre and One Fullerton Mall was shifted back to the corner. Through virtual testing on Slam, we found that the longer path was too easy so we added a slope to it. However, the longer path has an incline of 25 while the shorter path has an incline of 30.
06
Fourth Iteration
When testing the Third Iteration, we found that 90% of the time the navigation model would choose the shorter path. Hence we removed the shorter path and there is only one path now. Length of the slope was reduced and incline was increased to 30 degrees. For aesthetics, we created a platform for the merlion to sit on to mimic the actual one and added water.

07
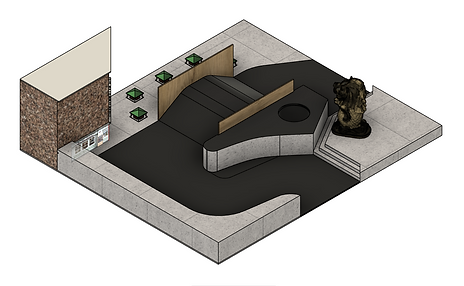
Final Iteration
When testing, we realised that the lidar would not detect the staircase and the side of the slope in iteration 3 and during testing would constantly climb the stairs or hit the sides of the slope. Hence we decided to shift the platform with the merlion to the corner and add a barrier with a height of 16 cm to mitigate that. This would also serve as road markings to assist in demarkating the pathway. Testing done on this arena was good
08
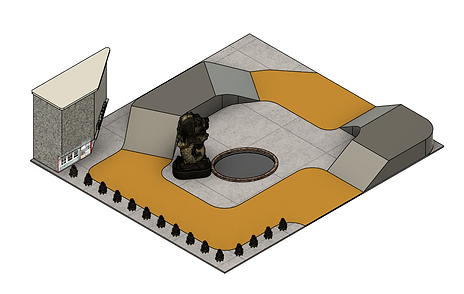
Final Iteration Real
On the platform, on both sides of the Merlion, trees were added to ensure LIMO does not climb the stairs. Here are images of the final arena



09
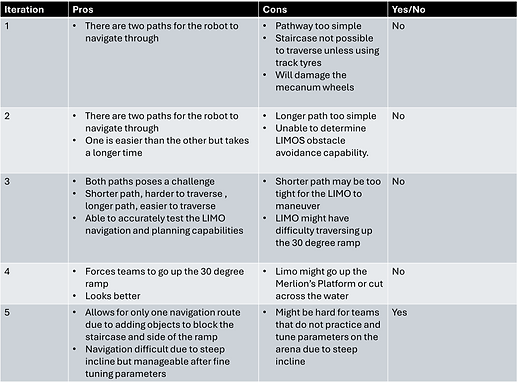
Analysis and Selection between Alternative Solutions
On the right, you'll find an analysis and selection between possible solutions, showcasing the decision-making process that led to the optimized navigation path.
10
Implementing and Proving a Solution
Verification:
The selected 3D model arena meets the specified requirements and adheres to the project constraints.
Requirements Traceability:
-
Trace back to User Stories: Verify that the selected 3D model arena aligns with the user stories (e.g., functionality, aesthetics, complexity).
-
Review Acceptance Criteria: Ensure that the arena model satisfies the acceptance criteria defined for the project.
Validation:
Functionality Testing:
-
Prototype Testing: Validate the 3D model arena through prototyping or simulation to ensure it functions as expected.
-
User Acceptance Testing: Conduct testing to verify that the arena model meets user expectations and is suitable for the LIMO robot's navigation and obstacle avoidance capabilities.